One would be hard put to find a set of whole numbers with a more fascinating history and more elegant properties surrounded by greater depths of mistery — and more totally useless — than the perfect numbers.
Martin Gardner
La bellezza dei numeri perfetti è stata ammirata, anche con una sorta di timore mistico, dai matematici di tutti i tempi.
I pitagorici, ad esempio, associavano il numero 6 al matrimonio, alla salute e alla bellezza.
Filone di Alessandria, nel primo secolo,
associò 6 alla perfezione e al movimento dei corpi organici, i quali possono spostarsi lungo sei direzioni (alto, basso, avanti, indietro, destra, sinistra). Oggi parleremmo di
gradi di libertà di un corpo rigido.
Nicomaco, nella sua
Introduzione all'aritmetica, scritta intorno all'anno 100, osserva l'armonia dei numeri perfetti, in equilibrio tra i
numeri difettivi e i
numeri abbondanti, e fa notare come 6, 28, 496 e 8128 siano i soli numeri perfetti compresi negli intervalli di estremi 1, 10, 100, 1000 e 10000. Inoltre, essi terminano alternativamente con la cifra 6 oppure con la cifra 8.
Sant'Agostino, vissuto a cavallo tra il quarto e quinto secolo, considerava il 6 come un numero veramente perfetto: Dio creò il mondo in 6 giorni proprio per dimostrare la perfezione della sua opera. Allo stesso modo
Alcuino di York, vissuto nel settimo secolo, notava come la cosiddetta
seconda origine fosse invece imperfetta, dato che si è basata sul numero 8, un numero difettivo (otto
erano infatti gli uomini contenuti nell'arca di Noè: Noè stesso, i suoi tre figli e le loro quattro mogli).
Roswitha di Gandersheim, badessa del convento di Gandersheim, in Sassonia, considerata la prima poetessa tedesca (anche se scriveva solo in latino), in uno dei suoi drammi, intitolato
Sapientia e scritto nel decimo secolo,
elenca i primi quattro numeri perfetti.
I numeri perfetti erano così importanti per gli ebrei che il rabbino
Josef ben Jehuda Ankin suggerì, nel suo libro dedicato alla cura dell'anima e scritto verso la fine del dodicesimo secolo, di studiare le loro proprietà.
Ericio Puteano, un enciclopedista, nei suoi scritti del 1640 riferisce l'associazione tra Venere e il numero 6, in quanto formato dalla
diade (femminile e pari) e la
triade (maschile e dispari).
Nei secoli seguenti i matematici hanno continuato a studiare le proprietà dei numeri perfetti, raccogliendo un notevole numero di risultati (e anche di congetture errate).
Se indichiamo con σ(
n) la somma dei divisori di
n (compresi 1 e
n stesso), allora un numero
N si dice perfetto se σ(
N) = 2
N. Se invece σ(
N)<2
N, allora il numero si dice difettivo, mentre se σ(
N)>2
N, allora il numero si dice abbondante.
Se un numero
N è perfetto, allora la somma dei reciproci dei suoi divisori è sempre uguale a 2.
Euclide, nella
proposizione 36 del libro IX degli
Elementi, afferma (in forma un po' più discorsiva) che se 2
n-1 è primo, allora
N = 2
n-1(2
n-1) è perfetto. Quindi la ricerca dei numeri perfetti è legata alla ricerca di numeri primi nella forma 2
n-1, detti
numeri di Mersenne.
Ogni numero primo di Mersenne genera un numero perfetto, e viceversa ogni numero perfetto genera un primo di Mersenne. Questo risultato è noto come teorema di Euclide-Eulero.
Il criterio di Cataldi-Fermat può essere d'aiuto: se 2
n-1 è primo, allora
n è primo.
Eulero, in un teorema pubblicato dopo la sua morte, ha dimostrato che se
N è un numero perfetto pari, allora esso può essere scritto nella forma
N = 2
n-1(2
n-1), dove 2
n-1 è primo.
Se
N è un numero perfetto pari, allora è anche un numero triangolare.
Se
N è un numero perfetto pari (e quindi può essere scritto come 2
n-1(2
n-1)), allora
n = 1
3 + 2
3 + … + (2
(n-1)/2-1)
3.
Sempre utilizzando la notazione del teorema precedente, se
N è un numero perfetto pari allora, scritto in base 2, possiede 2
n-1 cifre; le prime
n sono uguali a 1, le ultime
n-1 sono zero.
Ogni numero perfetto pari termina con la cifra 6 o con la cifra 8.
Se si sommano le cifre di un numero perfetto pari (escluso 6) e si ripete il processo fino ad avere una sola cifra, si ottiene 1.
Per quanto riguarda i numeri perfetti dispari, non sappiamo quasi niente. Non sappiamo nemmeno se esistono;
forse non esistono. Se esistono, sono sicuramente maggiori di 10
300, forse anche di 10
500.
Concludiamo la storia con un'affermazione di Sylvester, del 1888:
a prolonged meditation on the subject has satisfied me that the existence of any one such [odd perfect number] — its escape, so to say, from the complex web of conditions which hem it in on all sides — would be little short of a miracle.
Tutto questo, comunque, è per introdurre il Carnevale della Matematica numero 28. Il prossimo Carnevale-perfetto sarà il numero 496, che si terrà il 14 dicembre 2051, non si sa ancora dove.
Il prossimo Carnevale, invece, sarà il numero 29 e verrà ospitato dai
Rudi Matematici.
E ora andiamo a incominciare.
.mau., per quanto riguarda la categoria
Povera matematica, ha scovato due errori: in
Fanno sbagliare i conti già ai piccoli si vede come sia difficile fare una sottrazione, mentre in
Chilometro e mezzo quadrato fa notare come non sia proprio corretto confondere misure lineari con misure di superficie.
Per la categoria
link, il nostro ci segnala il
CD con la raccolta completa dei libri di Martin Gardner dallo Scientific American a prezzo scontato,
mathURL e asciiTeX, due sistemi per inserire formule matematiche nei propri siti e
math@stackexchange, una nuova community matematica in via di sviluppo (e in inglese, naturalmente).
Per la categoria
recensioni, ecco due libri:
Il matematico curioso, che cerca di mostrare come la matematica spunti dappertutto, se la si sa vedere;
Mathematical Recreations, storia della matematica ricreativa a.G. (cioè avanti Gardner).
Per la categoria
giochi, il
Futoshiki: un sudoku dove i numeri sono davvero numeri e non segnaposto.
Per la categoria
io, un importante annuncio:
Ho anch'io un numero di Erdős!
Infine, per la mega-categoria
Il Post (ovvero un altro blog matematico), abbiamo:
Il paradosso di san Pietroburgo: da un banale gioco di testa o croce non solo si può arrivare a una vincita potenzialmente infinita, ma addirittura si ha che la vincita media è infinita! Proseguiamo poi con
Dal paradosso dell'Alabama ai deputati frazionari: il metodo proporzionale sembra essere il più equo per suddividere i deputati da eleggere; ma anche in questo caso sorgono dei paradossi. Poi abbiamo
Parole matematiche: parabola: che cosa hanno in comune i racconti evangelici con l'antenna satellitare? E ancora
Il teorema di Pitagora: il teorema più famoso della geometria merita indubbiamente una trattazione a sé. Seguono
Paul Erdős: i matematici sono spesso dipinti come persone piuttosto strane, anche se in genere non pericolose — beh, Erdős ha pienamente diritto di essere inserito in questa categoria;
La funzione base-13 di Conway: un post da leggere in parallelo a
Continuità (pubblicato qui): noi siamo abituati a pensare alle funzioni come qualcosa di disegnabile, ma non è che sia sempre così, anzi — ecco un esempio non molto noto di funzione assolutamente incredibile;
Parole matematiche: prodotto, fattore: due parole al prezzo di una: stavolta l'origine è latina e non greca, e soprattutto hanno in comune qualcosa in più di quanto si potrebbe pensare a prima vista;
La serie armonica: molte successioni hanno una somma infinita, altre hanno una somma finita — la serie armonica va sì all'infinito, ma così piano che uno magari non se ne accorge nemmeno. Infine,
Problemini matematici ferragostani: per una volta, anche il blog di matematica si prende qualche libertà.
Ho scritto
infine, ma in realtà non è così: il 9 agosto ha iniziato a girare la notizia che forse è stato dimostrato uno dei problemi del millennio, la congettura più importante nel campo dell'informatica; pare cioè che sia vero che P != NP: .mau. ne ha parlato in
P != NP (o no?), fornendo anche una spiegazione del problema che vede coinvolti Gastone, Paperino e Qui, Quo, Qua.
Dioniso,
continuando la trattazione già pubblicata nello scorso carnevale, ci propone l'appendice
numero 1 e la
numero 2 alla sua serie
Chi vincerà il mondiale del 2014? Una questione di Logica intuizionista? Infine, un approfondimento alla appendice 2:
Tentativo di dimostrazione che nella logica intuizionista (I → ¬¬I), ma non (¬¬I → I).
Qui si può leggere o scaricare l'opera completa.
Gianluigi Filipelli ha mandato una lista dei suoi post corredati tutti con un'ottima e abbondante descrizione: lascio quindi la parola a lui per il commento ai suoi pezzi. Dal suo blog personale, dropsea, abbiamo:
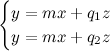
Calcolare le equazioni con Geogebra: due applet di Geogebra realizzate da due gruppi di miei ex-studenti del primo superiore: Stefano, Davide, Fabio, Alessandro. Un modo per risolvere le equazioni come intersezione tra figure geometriche.
Un problema pitagorico: un altro post realizzato grazie al contributo delle applet di miei ex-studenti dell'ultimo anno scolastico. In questo caso Federica, Hazel, Giuditta, Stefano, Matteo hanno risolto un problema pitagorico che ho trovato sul blog di Annarita utilizzando Geogebra.
Integrali e polilogaritmi: una collega mi ha proposto un integrale. Ho provato a risolverlo, ma vedendo che arrivavo a un certo punto e mi bloccavo, ho... barato usando Wolfram Alpha... Ed ecco la sorpresa!
Da Science Backstage, invece, Gianluigi propone i seguenti post:
L'algoritmo del destino: il mitico John Conway, oltre al famoso gioco della vita, ha realizzato anche molte altre cose nell'ambito della ricerca matematica ricreativa. In particolare un algoritmo con il quale è in grado di calcolare a mente il giorno della settimana corrispondente a una certa data. &Ergave; stato, però, recentemente proposto un aggiornamento da parte di Chamberlain Fog, e quindi anche di questo si va a discutere nell'articolo.
Scalando il Tourmalet: di tutti i post dedicati al Tour de France, questo è quello che contiene esplicitamente la matematica, grazie alla pendenza di una retta.
La storia di Achille e della tartaruga: un nuovo Rompicapo, tra fisica e matematica. Se nella prima parte si affronta il famoso paradosso di Zenone dal punto di vista della fisica, nella seconda si esamina un nuovo paradosso che coinvolge Achille e la tartaruga, questa volta elaborato dal grande Carroll.
Terne non pitagoriche, aree intere: sappiamo tutti che le terne pitagoriche altro non sono che tre numeri interi che verificano il Teorema di Pitagora. È allora possibile trovare, data l'ipotenusa, due altri cateti non necessariamente naturali che danno come area del triangolo un numero intero? Provo a rispondere con questo piccolo problemuccio geometrico. Alla fine anche una applet Geogebra (giusto per non farsi mancare niente!)
Peppe Liberti ha parlato di Bessel e delle sue funzioni in
Funzioni sulla sabbia, e poi si è lamentato di un certo uso della matematica in
Cosa non sopporto della matematica (basta la frase “i
misteri della scienza” per spiegare contro cosa se la prende Peppe?)
Maurizio ha poi scritto
Ma quasi tutti sanno che…, dove si può trovare un'applicazione del principio di induzione per dimostrare una proprietà della somma dei cubi di tre numeri maturali consecutivi, e
Joseph Ludwig Raabe, un breve profilo del matematico svizzero con un'applicazione del suo criterio di convergenza per le serie numeriche.
Claudio Pasqua, da Gravità Zero, partecipa con il post intitolato
“Sua Altezza” Talete di Mileto, in cui riporta e amplia un articolo comparso su MondoErre riguardante il matematico e filosofo greco. Il post si conclude con un semplice problemino, intitolato L'elefante e il topolino (semplice ma non stupido, non fatevi ingannare…).
Annarita Ruberto ci manda, come al solito, una lunghissima serie di contributi. Per quanto riguarda la storia della matematica e la divulgazione, abbiamo:
Talete: Il Fondatore Della Matematica Greca [Scheda Storica]: una scheda storica sul grande Talete.
Perché Non Usiamo Più I Numeri Romani?: l’articolo riporta un brano estratto da libro di Clifford Pickover
Le Meraviglie dei Numeri, in cui un ragazzo pone la domanda “Perché non usiamo più i numeri romani?” al dottor Googol. Un “Googol” è un numero pari a 10mila decaexilioni, ovvero un numero intero esprimibile con 1 seguito da 100 zeri. Ma il Dottor Francis O. Googol «è un personaggio di cui Clifford Pickover narra le avventure matematiche». Sarà, infatti, il Dottor Francis O. Googol a «trasportarci verso nuovi mari, rendendo più profonde le acque e allargando gli orizzonti». Nel brano sono contenuti due rompicapo con i numeri romani.
Perché Si Usa IIII E Non IV Sui Quadranti Di Alcuni Orologi?: l'articolo nasce da una domanda posta da un lettore in un commento al post "Perché non usiamo più i numeri romani?".
I Numeri Di Mozart: che la musica di Mozart avesse a che fare con i numeri e con la matematica è cosa risaputa. Grazie a un progetto promosso da alcuni insegnanti inglesi si è scoperto, infatti, che ascoltare la musica mozartiana migliora le performance degli studenti in ambito matematico. L'articolo riporta un brano tratto dalla Magia dei Numeri di Clifford Pickover.
L'Eredità Arabo-Indiana [Scheda Storica]: il contributo dei matematici indiani e di quelli arabi allo sviluppo del pensiero matematico universale.
Il Problema Di Euler: problema contenuto nella Introduzione all’algebra di Euler, che impressionò Stendhal.
Leonardo Pisano (detto Fibonacci).
Per quanto riguarda la didattica, annarita ha scritto:
La Tavola Pitagorica E I Numeri Quadrati: un contributo di Bruno Berselli per Matem@ticaMente. Sappiamo che solitamente la Tavola pitagorica viene presentata come uno schema quadrato di 10×10 o 12×12. Può allora essere interessante chiedersi se essa abbia qualche caratteristica non ovvia legata ai numeri quadrati. Ne esiste una, in effetti, pur non essendo l’unica, che viene analizzata nell'articolo.
Problema Con Quadrato, Rettangolo E Triangolo Rettangolo, Risolto Con GeoGebra.
Paolo Pascucci ha preparato una serie di interventi dal titolo
Aritmetica e Cervello: l'aritmetica è connaturata ai cervelli di molti animali, oppure no? Ecco qua il
primo post, il
secondo e il
terzo.
Popinga partecipa con un solo, denso, contributo:
La matematica visionaria di Yi Sang. L’opera poetica del coreano Yi Sang, di cui ricorre quest’anno il centenario della nascita, è caratterizzata da versi liberi, originali grafie, giochi di parole, che disorientano il lettore, allora come oggi. Spesso il carattere e l’impaginazione hanno un aspetto matematico, evocando formule numeriche e combinatorie, con simboli, parentesi, punti, deliberata sovversione degli spazi. Inoltre i testi della traslitterazione coreana rivelano un gioco occulto di regole, di ripetizioni, di simmetrie e di giochi di specchi impossibili da rendere nel nostro alfabeto.
Questo mese abbiamo una new entry: si tratta di
Melassa, che ha scritto un post intitolato
Il soggetto noto. Il matematico Oliver Byrne diede alle stampe nel 1847
The first six books of the elements of Euclid: in which coloured diagrams and symbols are used instead of letters for the greater ease of learners, definito dall’
American Scientist il più bel libro di matematica di tutti i tempi. Byrne concepì questa edizione di Euclide come un sistema completamente nuovo per imparare la geometria, riducendo al minimo il testo scritto e dando forma visuale alle informazioni. Il suo testo da un punto di vista di didattica della matematica è assolutamente inutile, ma le sue composizioni geometriche anticipano l’arte di Mondrian e di tanti altri pittori del Novecento.
I
Rudi Mathematici ci scrivono direttamente dalla loro riunione di comitato di redazione, proponendoci i seguenti contributi: uno dei migliori compleanni mai usciti dalla penna di Alice, quello del misconosciuto
Robert Hooke, a cui fa buon seguito uno dei migliori
Zugzwang! (si sente che stanno facendo la riunione in terra tedescofona?), i
Secondi scivolosi secondo il GC. Segue poi la
soluzione al quiz pubblicato su
Le Scienze (i Rudi si chiedevano se io volessi pubblicarlo sul carnevale della matematica, e hanno quindi aggiunto la seguente descrizione:
considera che l'occasione di vedere Alice in costume da bagno è davvero rara. Vedete voi se dare un'occhiata o no). Segue poi un bel post, che ha fortemente voluto Rudy:
si tratta di indicare i libri di argomento (più o meno) matematico per l'estate, per le vacanze, per la vita e per tutto il resto. A dire il vero hanno rubato l'idea ad un blog confratello (quello di Daniela Ovadia), ma tanto l'idea l'aveva già rubata anche lei… Si continua poi con altri due compleanni: quello di
P.A.M. Dirac, sempre dalla penna di Alice, e quello del glorioso
Erwin Schroedinger. Ma a tenere un blog son buoni tutti: i nostri sono anche arrivati a pubblicare il
numero 139 di una prestigiosa rivista di matematica ricreativa; dite voi se è poco.
Il Carnevale finisce qui: divertitevi.